YKD2405PC CAN-Bus stepper drive is based on YKD2405M. It has bus communication and uniaxial controller. YKD2405PC uses CAN-Bus interface, and support standard CANopen CiA301 and CiA402 protocol.
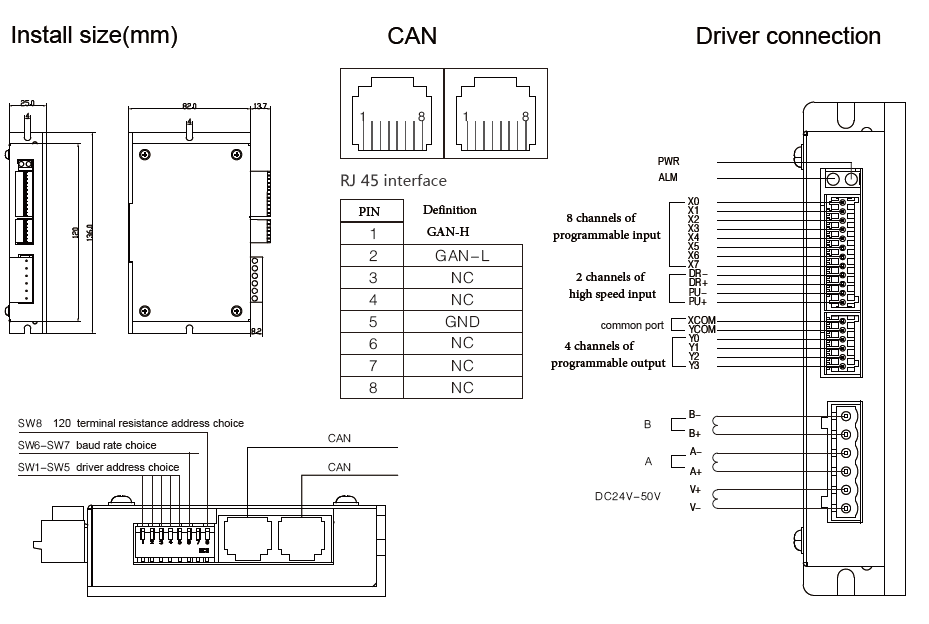
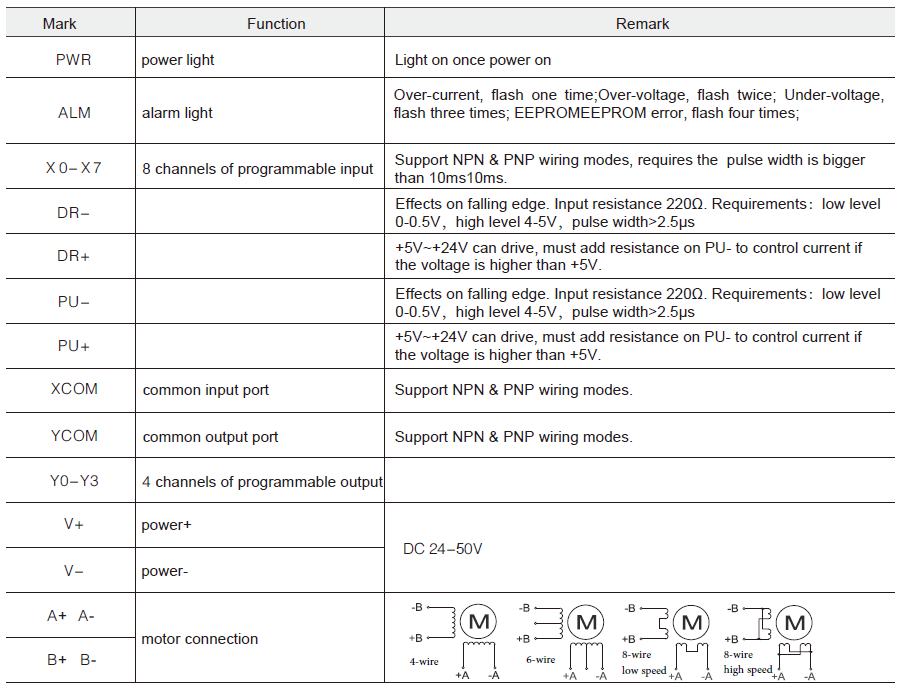
It has 2 photoelectric isolated programmable high-speed differential input terminals, 8 photoelectric isolated programmable input terminals and 4 photoelectric isolated output terminals. With those multiple input/output terminals, it’s used to carry out current setting, position control, speed control, home position return and other uniaxial motion control.
YKD2405PC is particularly suitable for long distance, strong interference environment, and multiple motor control applications. Since it has uniaxial control function, users don’t need to purchase controller anymore, thus greatly reduce costs.