SSD2505PR takes the advantages of 32-bit DSP control technology and power angle control technology, maximum speed reaches more than 3000rmp. It’s high-speed torque attenuation is much lower than ordinary open-loop stepper drive, which can greatly enhance the high-speed performance and torque efficiency, and reduce motor heating/vibration, thus to enhancing machine’s efficiency and accuracy.
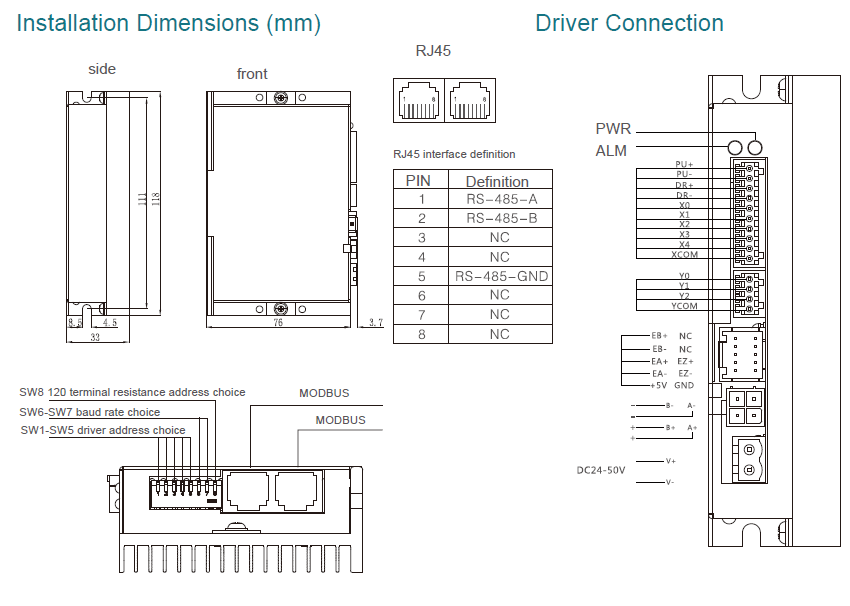
SSD2505PR integrated with bus communication and uniaxial controller, equipped with RS-485 interface, and support standard ModBus-RTU protocol.
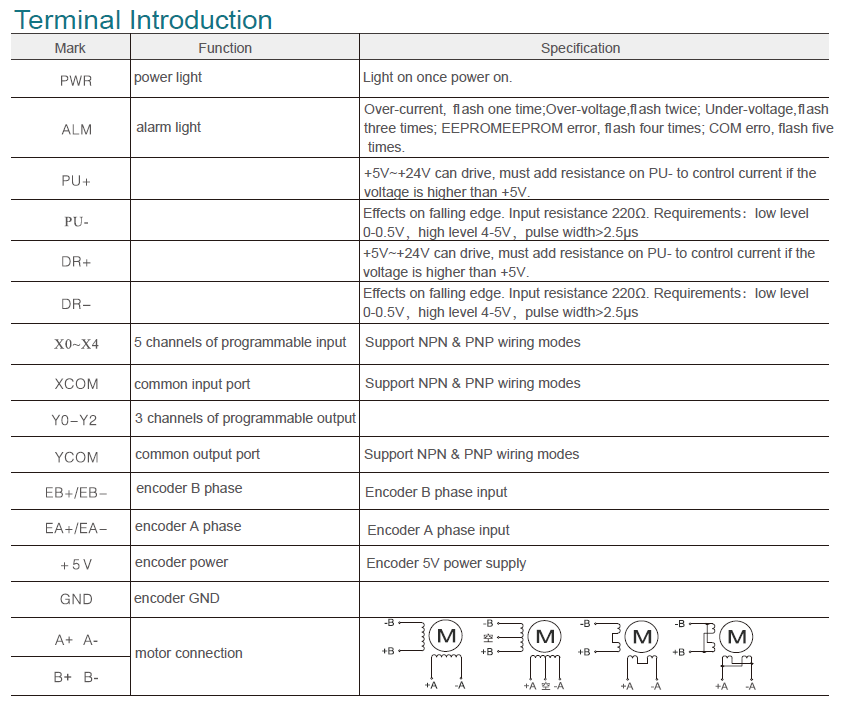
It has 2 photoelectric isolated programmable high-speed differential input terminals, 5 photoelectric isolated programmable input terminals and 3 photoelectric isolated output terminals. With those multiple input/output terminals, it’s used to carry out current setting, position control, speed control, home position return and other uniaxial motion control.
SSD2505PR is particularly suitable for long distance, strong interference environment, and multiple motor control applications. Since it has uniaxial control function, users don’t need to purchase controller anymore, thus greatly reduce costs.